|
> Impressum
> Profile
> Products
> > Heave Comp.
> References
> Publications
> Contact
Member of


|
The GeoTopic Heave Compensation
sponsored by the European Community, patent pending
 Task
Task
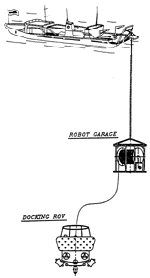
Deploying valuable cable bound equipment into the deep sea is risky like
playing yoyo with a gold bar. The strongest steel cable even stretches like a rubber string. Your payload would swing up and down by some 5 to 15 metres several times per minute like a bungee jumper. It is a forced oscillation caused by waves and sea state. There is an obvious need to stabilize your payload and to damp away these oscillations.
All heave compensators available on the market are acting on the cable length. They may well perform on short cables as used for shallow water operations (shelf areas). unfortunately, they fail under deep ocean conditions, in particular at rough weather. Often the results are even worse. So the heave compensator is switched off and you loose time waiting for calm weather.
Solution
Closer investigation of the actual oscillation process has shown major non-harmonic components. Due to the elasticity of the long cable the payload deep down in the ocean does not simply follow the movements of the vessel at the surface. Therefore, you need a good method to control the cable length in function of
- the vertical movements of the vessel
- the force acting on the cable (appearing weight of the payload at any moment)
- length of the cable
- timing
- and other
How are the various factors linked together? Well, take the smart box from GeoTopic and plug in the signals of various sensors. A superior software does some calculations and provides the control signals to perform a proper job:
- signal 1 is acting on the storage winch of your deployment on board
- signal 2 is acting on your heave compensator (no matter, whether you apply a crane system or deviator drums for the
cable or any other way)
Advantages
- safer ROV-operations
- less dependent on favourable weather (more working time)
- better yield of your investments
- ample use of your existing winch system
- reducing cable attrition
- much more (you know best)
Performance
The following diagram shows the performance of the system.
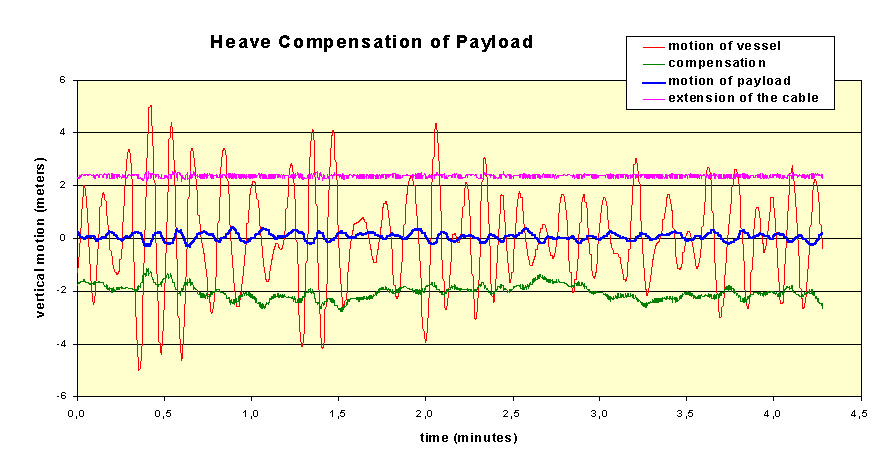
- red line: motion of vessel at A-frame
- pink line: extension of cable
- green line: compensation (This is the effect of the heave compensator on the length of cable paid out)
- blue line: residual vertical motion of payload with heave compensation
To download flyer please click here...
Simulation Environment
This control system which controls a heave compensator/ winch system has been developed in an simulated environment. The following diagram shows the structure of this simulation.
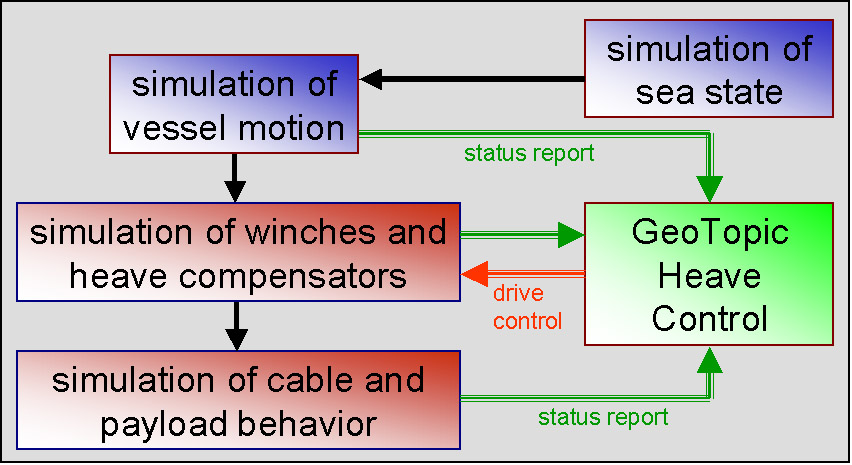
The simulation process consists of several modules and iterative steps:
- first the simulator provides an independent sea state with adjustable parameters for wave height, wave length, wave period with additional non-harmonic modes
- second a simlated vessel is introduced with adjustable parameters for length, distance of A-frame to the center of the vessel, the heading to the wave direction etc.
- third the excitation of the forced motion to the cable carrying the payload in the deep sea is calculated. The action of the cable to the vessel motion is neglectable. Thus the blue parts in the scheme are independend of the heave compensation process.
- Then the red boxes are simulated. The simulation reproduces the action of the winch system and the proper heave compensator on the cable in terms of meters of cable pulled in or paid out per time increment.
- the second red box simulates the behavior of the cable. Several adjustable parameters allow to simulate many types of cable with varying characteristics such as elasticity, diameter, damping inside the cable or to the water, specific mass etc.
- Now, imagine a heavy payload (i.e. 2 to 10 tons) at the end of the cable 2000 to 6000 m below the statioanry vessel. Thus, in terms of mechanics the red boxes represent an oscillating system with an erratic forced excitation through the blue box system.
- So far the entire system would be passive. The payload will perform sea state induced vertical oscillations.
- But, now the green box is introduced: An active control to the winch system which will as a result pay out or pull in a little bit of cable.
- And now the simulation of the entire system becomes complex: There is a loop back of effects.
- So, while observing the entire environment including the excitation, the status of the winch system, the forces and movements of the cable and of the payload the green box gains control and puts out the rigth commands to the cable drives in order to fix the vertial position of the payload.
Conclusion:
With a well performing heave compensation the payload is at rest. You do not need power to work against the earth's gravity potential field. You need not to now about the specific hydrodynamic resistance of the payload because it is at rest. Neglecting is not critical because the inertia of the payload would support the damping work of the heave compensator.
For more information please send us an email...
Thank you.
|
Thanks
to the Europeen Union, having funded basic developments at Geomar Technologie in stimulating cooperation with Ifremer and VWS in Berlin.
Our special thanks are dedicated to the Fachhochschule Kiel, Prof. Krull, and the TU Hamburg-Harburg, Prof. Ackermann, for enhancing developments as well as to the Technologie-Stiftung Schleswig-Holstein for financial support.
|
|
